| Autor |
Nachricht |
|
TitanTrader
Hop-Up Held

Anmeldedatum: 28.02.2010
Beiträge: 101
|
 Verfasst am: 29.11.2010, 22:39 • Titel: Strombegrenzung (einstellbar) bis 200 A - Strombegrenzer Verfasst am: 29.11.2010, 22:39 • Titel: Strombegrenzung (einstellbar) bis 200 A - Strombegrenzer |
|
|
Hallo,
ich benötige für mein aktuelles Projekt (http://www.offroad-cult.org/Board/brushless-bl-16-offroad-car-auf-carbon-fighter-basis-t20669.html) eine Strombegrenzung. Warum?
Zum einen möchte ich sicherstellen, dass weder Controller noch Motor bei zuviel Stromfluss Schaden nehmen und zum anderen um bei Hochgripniveaus den Druck aus dem Antrieb zu bekommen.
Gefunden habe ich bisher 2 Lösungen. Beide haben den Nachteil, dass sie aus dem E Pocket Bike Bereich kommen und neben der Strombegrenzung eine Gassignalumsetzung machen. Die brauche ich nicht.
Was ich brauche ist etwas, wo auf der einen Seite die Batterie und der Receiver (Gassignalleitung) sind und auf der anderen Seite der Batterie Ausgang und der Ausgang zum ESC (Speed Controller).
1. Lösung: Tetz
http://www.recumbents.com/wisil/tetz/TransientSpikeReduction/default.htm
Schaltplan:
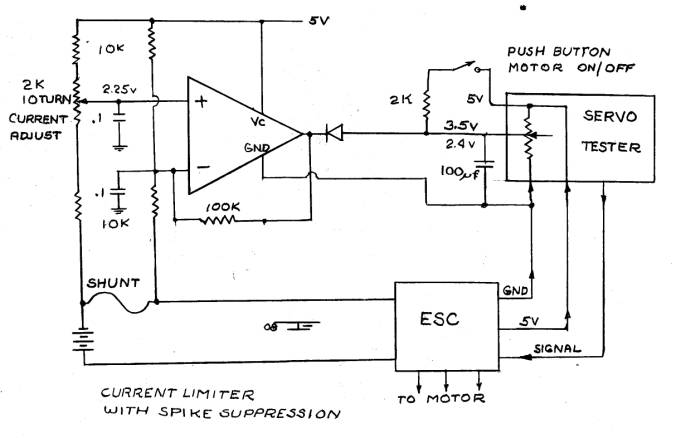
Ohne Strombegrenzung:

Mit Strombegrenzung:

Hier wird wohl mittels eines Shunts bei zu viel Strom die Spannung reduziert. Durch den Shunt wird Energie verbrannt. Es kommt ein Servotester als Signalgeber zum Einsatz, den man (eventuell??) direkt durch die Signalleitung vom Empfänger ersetzen könnte.
2. Lösung: Fechter
http://endless-sphere.com/forums/viewtopic.php?f=16&t=9940
Schaltplan:
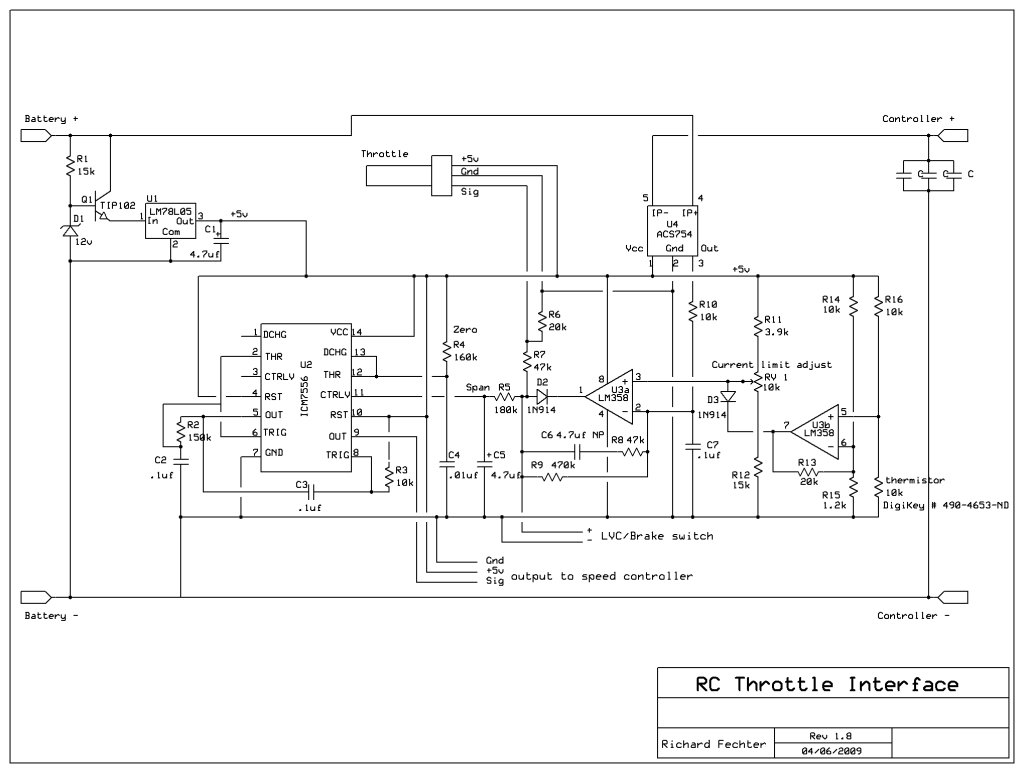
Diese sieht wohl so aus, dass bei zu viel Strom der Gasimpuls verringert wird. Über den ACS754 wird ein Steuersignal (Spannung zum GND) erzeugt, welches in Anhängigkeit des Potis und über die Operationsverstärker den Eingang des NE556 (Timerbaustein) angesteuert wird. Leider wird durch den NE556 in der aktuellen Schaltung von einem analogen Poti-Input-Signal ausgegangen. Ich bräuchte hier als Eingang das normale Throttle Signal vom Receiver.
Schön ist, dass durch den zweiten Operationsverstärker optional ein thermischer Widerstand angeschlossen werden kann, welcher bei Übertemperatur (100 Grad C) ebenfalls das Gassignal reduziert. Die Reduzierung der Spannung von ca. 35 V auf 5 V für die Versorgung des ACS754 könnte man über eine Kaskadierung von LM7805 oder so erhalten. Das schöne beim ACS754 ist, dass es ihn in verschiedenen Leistungsstufen gibt. Man könnte also durch dessen Austausch mit einem ACS 200 A das Ganze auf für sehr große Motoren/Controller verwerden. Oder mit einem ACS 50 A für relativ kleine Gespanne.
Wenn ich mich richtig erinnere, sind die Servosignale PWM. Der NE556 kann am Ausgang ein solches Signal erzeugen. Vielleicht könnte man das IC weiterverwenden?
Ich finde momentan die Lösung 2 besser und könnte mir vorstellen, dass auch viele andere daran Interesse hätten.
Natürlich weiß ich, dass einige Controller ähnliches schon eingebaut haben. Allerdings nicht alle und einige von den Controllern, die eine Current Control haben, haben die Abschaltung nicht linear sondern absolut.
Daten: Eingangsspannung wäre so bis 8s (35 V), Strom erstmal bis 100 A, später auch 200 A.
Kann jemand die zweite Lösung auf einen normalen (Throttle) Servoeingang umgestalten? Gibt es sonst noch Vorschläge, das Problem vielleicht anders zu lösen oder die Schaltungen zu verbessern?
Grüße
TT |
|
| Nach oben |
|
 |
Softeisbieger
Werkstatt-Meister


Anmeldedatum: 17.03.2009
Beiträge: 172
Wohnort: Aachen/Bielefeld
|
| Verfasst am: 29.11.2010, 23:03 • Titel: |
|
|
Meine spontane Idee:
Benutz einen Mikrocontroller der zum einen über einen Shunt o.ä. den Strom misst und gleichzeitig zwischen Empfänger und Regler sitzt. Liegt der Strom im zulässigen Bereich, gibt der Controller das Signal einfach weiter, bei überschreiten eines Limit drosselt der Mikrocontroller das Signal.
Vorteil:
-Sehr wenige Bauteile:
-Shunt
-Mikrocontroller
-Kabel
-?
Versorgung über BEC des Reglers.
Die Umsetzung wird natürlich je nach Kenntnisstand beliebig kompliziert.
Man müsste auch wissen, wie lange die Stromspitzen so ungefähr dauern, ein wenig Zeit braucht man ja schon...
Habe gerade mal ins Datenblatt eines Atmega8 geschaut: Wenn ich mich nicht vertue braucht der für eine Messung etwa 0,25ms. (!?) (je nach Wahl der Frequenz,...) |
|
| Nach oben |
|
|
FlyingGekko
Globaler Moderator

Anmeldedatum: 01.06.2003
Beiträge: 4521
Wohnort: Linz/ Urfahr
|
| Verfasst am: 29.11.2010, 23:14 • Titel: |
|
|
| Softeisbieger hat Folgendes geschrieben: |
Meine spontane Idee:
Benutz einen Mikrocontroller der zum einen über einen Shunt o.ä. den Strom misst und gleichzeitig zwischen Empfänger und Regler sitzt. Liegt der Strom im zulässigen Bereich, gibt der Controller das Signal einfach weiter, bei überschreiten eines Limit drosselt der Mikrocontroller das Signal.
Vorteil:
-Sehr wenige Bauteile:
-Shunt
-Mikrocontroller
-Kabel
-?
Versorgung über BEC des Reglers.
Die Umsetzung wird natürlich je nach Kenntnisstand beliebig kompliziert.
Man müsste auch wissen, wie lange die Stromspitzen so ungefähr dauern, ein wenig Zeit braucht man ja schon...
Habe gerade mal ins Datenblatt eines Atmega8 geschaut: Wenn ich mich nicht vertue braucht der für eine Messung etwa 0,25ms. (!?) (je nach Wahl der Frequenz,...) |
Und das System wird mit ziemlicher Sicherheit instabil. Wenn dann muss man nen ordentlich digitalen Regler implementieren. Ein Schwellwertschalter ist da nicht die richtige Wahl.
Die Messung kann man weit schneller realisieren. Mit nem normalen µC sind Abtastraten im 10^(-4) s Bereich kein Problem (hab ich auch schon so realisiert). Darüber hinaus braucht man eben nen DSP.
Achja: Servosignale sind kein PWM-Signal in dem Sinn. Die Information wird da nicht in den zeitlichen Mittelwert gepackt, sondern in die Periodendauer einer Flanke.
mfg Stephan |
|
| Nach oben |
|
|
Softeisbieger
Werkstatt-Meister
Anmeldedatum: 17.03.2009
Beiträge: 172
Wohnort: Aachen/Bielefeld
|
| Verfasst am: 29.11.2010, 23:25 • Titel: |
|
|
| FlyingGekko hat Folgendes geschrieben: |
| Softeisbieger hat Folgendes geschrieben: |
Meine spontane Idee:
Benutz einen Mikrocontroller der zum einen über einen Shunt o.ä. den Strom misst und gleichzeitig zwischen Empfänger und Regler sitzt. Liegt der Strom im zulässigen Bereich, gibt der Controller das Signal einfach weiter, bei überschreiten eines Limit drosselt der Mikrocontroller das Signal.
Vorteil:
-Sehr wenige Bauteile:
-Shunt
-Mikrocontroller
-Kabel
-?
Versorgung über BEC des Reglers.
Die Umsetzung wird natürlich je nach Kenntnisstand beliebig kompliziert.
Man müsste auch wissen, wie lange die Stromspitzen so ungefähr dauern, ein wenig Zeit braucht man ja schon...
Habe gerade mal ins Datenblatt eines Atmega8 geschaut: Wenn ich mich nicht vertue braucht der für eine Messung etwa 0,25ms. (!?) (je nach Wahl der Frequenz,...) |
Und das System wird mit ziemlicher Sicherheit instabil. Wenn dann muss man nen ordentlich digitalen Regler implementieren. Ein Schwellwertschalter ist da nicht die richtige Wahl.
mfg Stephan |
Was genau meinst du mit instabil? Und was mit digitalem Regler?
Ja stimmt, daran habe ich gar nicht gedacht: Ist der Strom über dem Limit, soll ja zurück geregelt werden, aber gerade bis zur Grenze.
Ich glaub da ist ein guter Regelalgorithmus der Knackpunkt (und ich denke sehr schwer)... |
|
| Nach oben |
|
|
TitanTrader
Hop-Up Held
Anmeldedatum: 28.02.2010
Beiträge: 101
|
| Verfasst am: 01.12.2010, 23:29 • Titel: |
|
|
| FlyingGekko hat Folgendes geschrieben: |
| Achja: Servosignale sind kein PWM-Signal in dem Sinn. Die Information wird da nicht in den zeitlichen Mittelwert gepackt, sondern in die Periodendauer einer Flanke. |
Stimmt. Siehe hier: http://de.wikipedia.org/wiki/Servo
| wiki hat Folgendes geschrieben: |
| Am bekanntesten sind Servos aus dem Modellbau. Hierbei handelt es sich meist um einen DC-angesteuerten Motor. Zu diesem gehören drei Anschlussdrähte: die Versorgung (VCC), Masse (GND) und eine Kontrollleitung (PW). Servos im Modellbau werden weitgehend über eine Pulsweitenmodulation (PWM) angesteuert. Über die Breite der Pulse wird der Winkel, auf den der Servoarm gestellt werden soll, gesteuert. Gängig ist ein 50-Hz-Signal (20 ms Periodenlänge), welches zwischen 1 ms (linker Anschlag) und 2 ms (rechter Anschlag) auf High-Pegel und den Rest der Periodenlänge auf Low-Pegel ist. Ähnlich dient die Pulsbreitensteuerung von Gleichstromdirektantrieben der Drehzahlregelung. Zur Ermittlung der Neutralposition befindet sich im Servogehäuse oft ein Potentiometer, das mit der Ausgangswelle verbunden ist. |
High -Pegel ist meist > 2.7 V, kann aber auch bis 5 V gehen.
Jetzt habe ich noch eine dritte Lösung gefunden.
3. Lösung: Fechter 2
http://endless-sphere.com/forums/download/file.php?id=37782
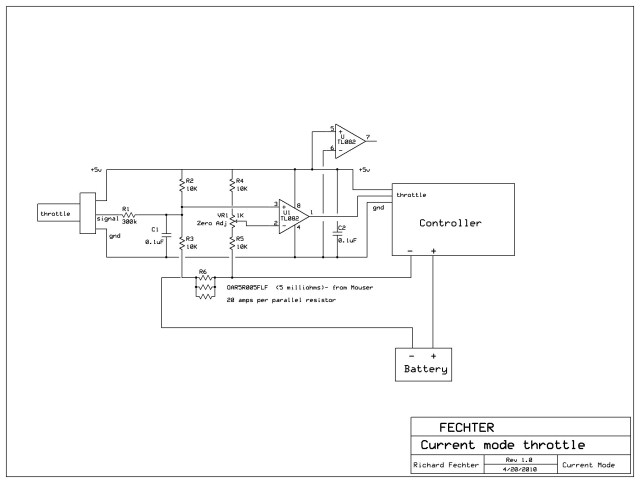
Was ich hier nicht verstehe ist, dass die direkt (naja, über den OpVerstärker) mit dem Hall-Throttle-Signal in den ESC gehen können.
Wenn das geht, müsste man doch das Throttel-Signal aus dem Receiver auch direkt dort durch jagen können. Oder ist das kein RC Controller?
Grüße
TT
Edit: Habs selbst gesehen, Lösung 3 Fechter 2 ist für analog Controller. |
|
| Nach oben |
|
|
FlyingGekko
Globaler Moderator
Anmeldedatum: 01.06.2003
Beiträge: 4521
Wohnort: Linz/ Urfahr
|
| Verfasst am: 02.12.2010, 23:44 • Titel: |
|
|
@Softeisbieger: Instabilität ist ein Begriff aus der Regelungstechnik. Vereinfacht ausgedrückt geraten instabile Systeme auser Kontrolle.
Ein digitalier Regler ist ein Algorythmus welcher im µController in Form eines Programms realisiert wird (also diskret). Das Gegenteil dazu wäre ein analoger Regler welchen man zb. mit OPV-Schaltungen realisieren kann.
Generell ist für ne ordentliche Regelung einiges an Know-How notwendig. An der Uni ging alleine für lineare Systeme fast der ganze Bachelor dafür drauf.
mfg Stephan |
|
| Nach oben |
|
|
florianz
CULT-Urgestein


Anmeldedatum: 07.11.2007
Beiträge: 2151
|
| Verfasst am: 05.12.2010, 11:34 • Titel: |
|
|
@tt
hast pn |
|
| Nach oben |
|
|
TitanTrader
Hop-Up Held
Anmeldedatum: 28.02.2010
Beiträge: 101
|
| Verfasst am: 16.12.2010, 14:13 • Titel: |
|
|
So, meine Lösung steht an sich. Die ersten Teile sind gestern eingetroffen und morgen sollte der ACS kommen, jetzt doch in der 200 A bi Version.
Folgendes habe ich vor:

Den Atmega zu programmieren sollte kein Problem sein. Ist ja fast mein täglich Brot. 
Hoffe nur, dass der Analogteil so hinhaut.
Oder sollte ich den ACS noch etwas entkoppeln, so wie hier beim kleinen ACS714 dargestellt?

Außerdem bin ich noch am überlegen, ob ich gleich noch an PD2/3 einen weiteren Eingang/Ausgang vorsehe, der dann als Pistix funktioniert. Das ist ja nichts weiter als ein Pegellängen Anpasser, INTS und Timer sind ja noch welche frei. Kann ja sein, dass ich sowas mal brauche.
Grüße
TT
Edit: Hab gerade noch nen Fehler bemerkt, Eingang geht besser auf PB0 und Ausgang auf PB1. Die Pistix Anpassung mache ich über 2 Jumper. Per Jumper wird dann gewählt: Nur Current Schutz, nur Pistix oder beides zusammen. |
|
| Nach oben |
|
|
FlyingGekko
Globaler Moderator
Anmeldedatum: 01.06.2003
Beiträge: 4521
Wohnort: Linz/ Urfahr
|
| Verfasst am: 16.12.2010, 16:53 • Titel: |
|
|
| willst du den atmega wirklich ohne externne Oszillator betreiben? Und Anit-Aliasing-Filter an den AD-Eingängen sollte man auch nie vergessen |
|
| Nach oben |
|
|
TitanTrader
Hop-Up Held
Anmeldedatum: 28.02.2010
Beiträge: 101
|
| Verfasst am: 16.12.2010, 18:20 • Titel: |
|
|
Den externen Oszi wollte ich eigentlich weglassen. Kostet aber nicht die Welt und könnte ich morgen noch von Segor mitbringen, wenn ich den ACS hole.
Welchen 8 Mhz Oszi sollte ich nehmen?
Auf Anit-Aliasing-Filter habe ich bisher nicht geachtet. Dachte, dass reicht auch so. Aber genau das ist das Problem. Ich kanndas Ding vielleicht in C oder ASM programmieren, aber von der Schaltung habe ich an sich keine Ahnung und hab mir das nur so aus den Foren zusammen gesucht.
Also, konkret, welche Teile fehlen noch und wo müssen die hin?
Messen wollte ich am AD mit 8 Bit.
Danke.
Grüße
TT |
|
| Nach oben |
|
|
|